PROJECT REPORTプロジェクトレポート
REPORT 0018
高精細カメラと正確な位置情報付与技術による点検サポートシステム
2024.05.29
本技術実証は、課題番号 0009「道路付属物や建築施設の点検業務の効率化」に関して検証したものです。
“高精細カメラと正確な位置情報付与技術による点検サポートシステム”

図-1 計測装置と計測のイメージ
インフラ運営・維持管理上の課題
インフラ維持管理業務は、5年に1度の定期点検を行うことにより検出された損傷や劣化・変状で、構造物の健全性を評価することを基本としている。また、定期点検で検出した損傷や劣化・変状の中で影響が大きい箇所については、1年毎の目視点検(愛知道路コンセッション(株)では総点検として実施)や、日常点検業務の中での巡回目視により、その損傷や劣化・変状を確認している。そのため、これらの業務は、多くの時間と人手を要し、点検のために交通規制を必要とする場合があるという課題を抱えている。また、健全度などの損傷や劣化・変状の判断基準といった点検業務におけるノウハウは属人化する可能性があり、将来的な技術者不足の問題により技能伝承が難しいといった課題も存在している。
このような社会課題を踏まえ、内閣府・デジタル庁・国土交通省はデジタル化原則に基づき、近接目視点検などに替わるインフラ点検方法の転換を求めており、早期に対応をしていく必要がある。
本検証の目的
本実証実験では、「走行車両に設置した360度パノラマカメラ等で撮影した高精細画像に高精度の位置情報を付与する技術」の道路維持管理業務への適用について以下の3つの検証を実施した。
- 高精細画像に付与される位置精度の精度検討
本技術では走行車両から撮影した高精細画像を位置情報で整理した。その高精細画像から損傷・劣化、変状のある構造物を探すため位置情報は重要である。高精細画像に付与された位置情報から画像を地図上にプロットし、実際に画像から確認した位置関係と比較することにより精度について検証した。 - 高精細画像を用いた近接目視点検の代替可能性の検証
走行車両から撮影した高精細画像を拡大表示して机上で構造物の劣化や変状を確認した。その確認作業での見え方を検証することで、点検業務における近接目視の部分を代替できる可能性について検討した。 - 高精細映像のその他用途の検討
位置情報を持つ高精細画像は、点検業務における近接目視の代替だけでなく、他の業務への適用も考えられる。本技術を様々な業務を行う方々に試用してもらい、その他業務への適用可能性についても検討した。
実証フィールド
本実証実験における対象フィールドは、総点検報告書データから点検対象物の密度が高い愛知道路コンセッション(株)の運用する以下路線の区間を評価対象とした。
| 評価対象路線 | 知多半島道路(上下線) |
| 評価対象区間 | KP1.6~KP12.8の11.2km |
先進技術の概要
本技術は、市販の高精細ビデオカメラの映像に、GNSS+ネットワークRTK測位による正確な位置情報を付与し、地図データベースに登録して、点検・施設管理業務を効率化するものである。
主に以下の装置からなる。(図-1システム概要参照)
- 高精細ビデオカメラ
車載式の360度パノラマカメラ(Insta360社製、TITAN 解像度:11K)(以降、360カメラと表記)
※今回の検証に使用。
車載式の4KSDIグローバルシャッターカメラ(IOI社製、4KSDI-mini 解像度:4K)
※参考撮影のみ、検証には使用せず。 - GNSS-BeatBox®(データロガー)
GPSセンサーから取得する世界標準時と緯度経度情報、シリアル番号をアナログ音声に変換し、音声データとして市販のビデオカメラに記録し、映像(画像)と位置情報を同期させる装置 - GV-Synce®(画像処理システム)
動画から静止画を切り出し、変換時に全ての画像にGNSS-BeatBoxで取得した位置情報を付与する装置 - 4D-db®(データベース)
画像を地図から検索、コメントやKP、施設名での検索が可能なGISデータベース。マルチアングル(前後左右上下6面)ビューワや360画像ビューワを有し、2画面表示で同一場所の2時期比較が可能。
.png)
図-2(システム概要)
先進技術の現場検証結果
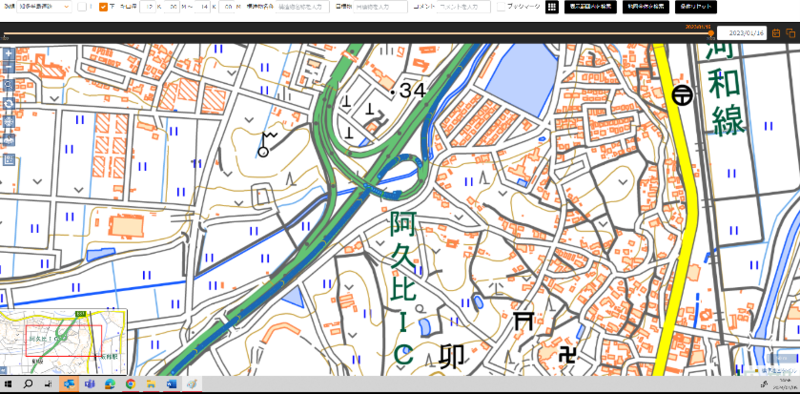
本実証実験では、カメラを搭載した車両を法定速度(80km/h)で走行しながら撮影し、アプリの地図情報上に整理した。アプリの画面の例を図-3に示す。
左地図上に青印でプロットされた部分が画像データの登録された部分で、撮影時間やキロポスト情報(以下、KPと略す。)からも画像を検索することができる。
 |
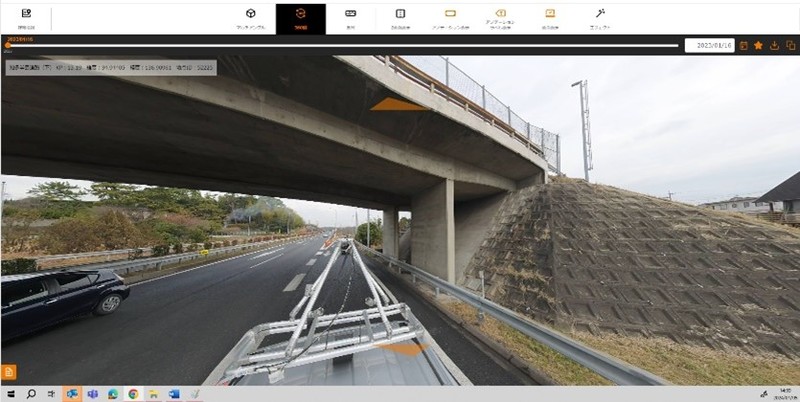 |
図-3 アプリ画面
①高精細画像に付与される位置精度の精度検討
撮影した360カメラの画像とGNSS-BeatBox (データロガー)で取得した位置情報をリンクさせ、4D-db(データベース)に登録し、KPで検索可能とした上で位置精度を検証した。
図-4に位置精度の検討結果を示す。位置精度は平均3m弱の進行方向へのズレが確認された。これはGNSS信号がカメラの音声に記録される際のタイムラグが原因である可能性があり、今後、改善が必要である事がわかった。しかしながら、点検のために道路付帯物の画像を探す目的としては、あまり気にならない程度のズレと評価できる。
参考として、過去(2022/2/4)と今回(2023/1/16)の撮影画像を4D-db上で比較した結果を図-5に示す。撮影日に差異があっても前述の進行方向へのズレの傾向と原因は同じである事から、撮影日が異なっても結果的にほぼ同じ場所が地図アプリ上で表示された。
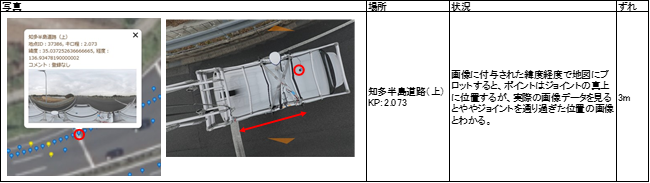
図-4 位置精度の検討結果
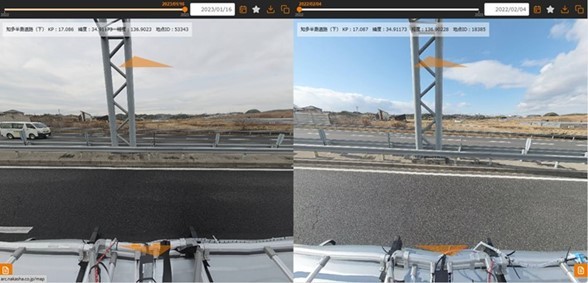
図-5 新旧画像比較(左:2022/2/4画像、右:2023/1/16画像)
②高精細画像を用いた目視点検の代替可能性の検証
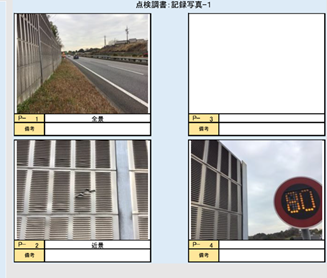
まず初めに、点検業務における近接目視の観点で、アプリ上の撮影画像を用い総点検報告書に記載のある変状が確認できる画質が得られているかを確認した。図-6に総点検報告書と撮影した画像の比較例を示す。図から概ね良好な画質が得られており、走行時に360カメラで撮影をした画像を用いることにより、総点検報告書で使用する写真を本技術で撮影した画像で代替可能なことが明らかとなった。天候などの撮影環境やシャッタースピードなどの影響で一部不鮮明なものも見られたが、カメラの変更や撮影方法の調整により画質の改善が見込まれる。
 |
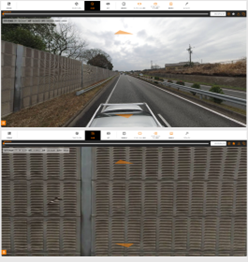 |
図-6 総点検報告書画像と撮影した画像の比較例
続いて、アプリ上の画像を用いて机上で目視点検を実施し、実際に点検者が現地に行って実施した総点検帳票および総点検報告書の結果と比較した。評価した結果を表-1に示し、その評価レベルを表-2に示す。
点検対象物339点の内、4D-db上では61.4%を目視する事が出来た。一方で本線上からの走行撮影では対象物が確認できないものが38.6%あった。その例としては、走行車線からは見えない料金所の屋根上のボルトの腐食等が挙げられる。
アプリ上で目視できた点検対象物208点の中で、変状を詳細まで確認できた割合は11.1%、対象物は目視できるが変状を十分に確認できなかった割合は88.9%であった。変状が十分に確認できない原因として、撮影のタイミングでの並走車両や駐停車車両、標識柱の根本部分での植栽(雑草繁茂)等の影響や撮影条件(逆光・反射など)の影響があることが分かった。植栽等の影響を除けば、それらは複数回撮影や撮影時の工夫で改善できる可能性があると考えている。
また、図-7に評価レベルⅡとなったその他の例を示す。看板や支柱等は、走行撮影によりある程度全体像は確認ができるものの、部分的に確認しにくい範囲が存在する。例えば、図に示すような車道と反対側のボルトの腐食状況を確認することは難しい。このような場合は、変状全体が確認できないため、本報告では評価レベルⅡと厳しめに評価している。
表-1 目視出来た点検対象物の評価結果

| 評価レベル | 評価内容 |
| Ⅰ | 対象となる道路付属物が把握可能で、変状が確認できる。 |
| Ⅱ | 対象となる道路付属物が把握可能だが、変状が確認できない。 |
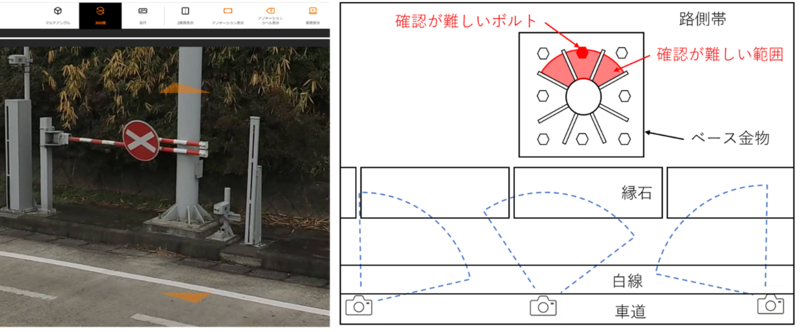
図-7 評価レベルⅡとなった対象の例
③高精細映像のその他用途の検討
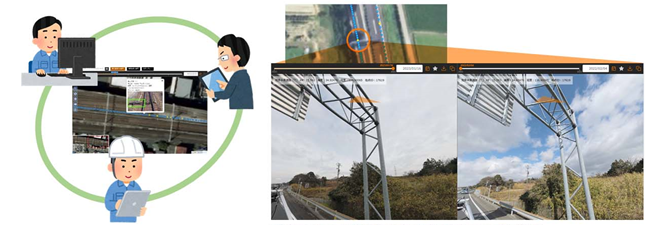
本実証で得られた画像は総点検業務以外にも活用先があると考え、その他の用途をヒアリング調査し、活用の場面を調査した。結果として以下の作業での本技術の活用事例が挙げられた。
(ア) 道路・SA/PA駐車場のペイントの劣化の確認
(イ) SA/PA駐車場の縁石・車止め劣化の確認
(ウ) ガードレール・ラバーポール・クッションドラム等の劣化・変状の確認
(エ) 法面・中央分離帯の樹木、雑草の繁茂状況の確認
(オ) 排水溝の確認
(カ) 経時的な路面劣化状況の確認
_1.png)
_2.png)
_3.png)
図-8 (活用事例)
〇まとめ
本実証では、3つの項目について実証を行い、以下のような結果となった。
①得られる高精度画像の位置精度は、点検のために道路付帯物の画像を探す目的としては、満足できるモノであった。
②目視点検の代替可能性については、画質的には問題ないものの、本実証では360カメラを車上に設置した状態での撮影範囲に限られるため、どうしても不可視のアングルが発生し、総点検の対象物を網羅出来ず、総点検の完全な代用としての運用にはまだ多くの改善が必要である事がわかった。
③その他用途の検討については、総点検の代用以外にいくつかの活用事例がヒアリング結果より挙げられた。また、それ以外の活用方法を以下に示す。
- 総点検以外の巡回目視点検の代用
- 資産台帳と4D-dbを紐付け、構造物の状況や経年劣化の確認
- 4D-db画像の報告資料等への活用
- 経時的なデータ蓄積による損傷のデータベース化による、劣化の進行評価や複数人確認による判定の補助ツール
- 会議室での工事打合せ等における、複数人での現場状況(モニター上)確認ツール
今回は検証範囲外であったが、GNSS-BeatBoxと4D-dbの仕組みは「位置情報」と「時系列」の組み合わせで管理が出来る事に大きなメリットがある。撮影箇所の緯度経度情報をキーにして時系列管理を行うことで、画面上で2時期比較ができ、発注者、受注者、関連会社等で劣化の進行状況などの情報の共有を図る事ができると考える。
本技術の適用性
愛知道路コンセッション㈱は、国交省等で推進しているデジタル化原則に基づいた規制の見直しによる状況の変化に対応するため技術情報を集めている。本技術実証では、自社で行っている総点検を技術で代替する可能性について検討した。結果として本技術により概ね目視点検を代替することは可能との評価であるが、総点検の近接目視点検の全てを本技術で代替することは難しく、他の技術でデータを補う必要があると考えられるものの、スクリーニングの効果は認められるので、業務効率化にはつながると考えられる。また、総点検記録と位置情報の組み合わせによるGIS化により、業務知識の伝承などに効果的であると考えられる。
以上のように、インフラの維持管理に係るデジタル化に大いに資する技術と考えられ、様々なインフラ維持管理への活用の提案を期待している。
今後の取組み予定
本実証に使用したデータベース(4D-db)は、写真上へのコメント付与機能など、機能追加をしたバージョンをリリース予定である。また他の道路管理事業者様との実証もフィードバックし道路維持管理に関する4D-dbの活用モデルを構築する予定である。
先進技術保有企業
ナカシャクリエイテブ株式会社 交通部
会社HP:https://www.nakasha.co.jp/
サービス紹介サイト:https://www.nakasha-digital.com/tenkaku/
お問い合わせ窓口
マエダアクセラレートフィールズ事務局
TEL:0297-85-6606
Mail:jimukyoku-aaf@jcity.maeda.co.jp